本系统让液压缸实现自由进退动作,以便完成预想的‘夹持’和‘震撞’两个功能。‘夹持’功能即:让液压缸的活塞杆根据物件的尺寸、承受压力能力等夹住物件,使物件不发生脱落或移位,以便对其进行固定或搬运。‘震撞’方式即:让液压缸的活塞杆快速、高压地完成进退动作,以便使其对物件产生一定的冲击力,使其发生形变或破碎。本系统是用上位机实现对液压系统的控制。主要是控制液压系统完成基本的动作:液缸的自由进退,从而实现对物体的夹持或震撞。总的控制系统的结构是:上位机用力控组态软件做人机界面,实现各种控制的可视化;下位用PLC实现电磁换向阀、变频器的控制;利用组态软件对PLC的监控实现系统的实时控制。
1.工艺简介
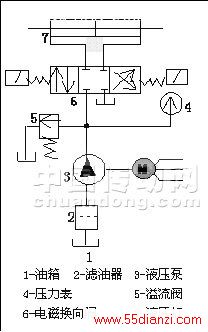
液压传动在机床上应用很广,具体的结构也很复杂,下面简要介绍本系统动作情况。如图1所示,液压缸固定不动,活塞连同活塞杆带动工作台可以作向左或向右的往复运动。图1中所示为电磁换向阀6的左端电磁铁通电而右端的电磁铁断电状态,将阀芯推向右端。液压泵3由电动机带动旋转,通过其内部密封腔的容积变化,将油液从油箱1中,经滤油器2、油管吸入,并经电磁换向阀6压入液压缸7的左腔。迫使液压缸左腔容积不断增大,推动活塞及活塞杆连同工作台向右移动。液压缸左腔的回油,经油管、电磁换向阀排回油箱1。当换向阀左端电磁铁断电而右端通电时,液压油便进入液压缸的右腔,推动活塞及活塞杆向左运动。当这两个过程交替实现时,就可以实现工作台的往复运动了。当电磁换向阀6的左右端电磁铁都断电时,阀芯在两端弹簧的作用下,处于中间位置。这时,液压缸的左腔、右腔、进油路及回油路之间均不相通,活塞及活塞杆连同工作台便停止不动。由此可见,电磁换向阀是控制油液流动方向的。
2.PLC控制系统设计
2.1硬件设计

如图2所示,为系统中PLC与变频器及电磁阀的接线图。PLC控制变频器实现“八段速调速”,以便能够根据工作的需要通过调节电机转速的方法来改变输出压力。这样使得运转中的节能效果明显,降低系统的运行成本。变频器可以通过控制端子来实现频率的改变。系统采用OMRON 和台达VFD-A型号变频器,此变频器可以通过控制端子MI1、MI2、MI3来实现八种速度的调节。具体操作为:首先在变频器内部设置好相关参数,PR.16、PR.17、PR.18、PR.19、PR.20、PR.21、PR.22七个参数的设定值为七个不同的运转频率,再加上初始频率总共有八个频率,便可以实现“八段速调速”了。其控制信号是通过上述三个端子MI1、MI2、MI3接收的,即这三个端子可以实现八种组合,如下表所示:

这样便可以方便的实现调速了。
变频器上的FWD控制端子是实现电机正转/停止控制的;REV是反转/停止控制信号接线端子。由于本设计中所用电机带动的是液压泵,由其运转方式决定了电机不能够反转。为了防止反转情况的发生,首先把变频器内部参数PR.24(反转禁止设定)设为d0001即可使得变频器拒绝接收反转命令。然后在变频器控制端子接线时只接FWD端子就可以了。为了对液压系统的液压泵以及辅助设备进行保护,使得电机转速在一个比较安全合理的范围内,对变频器PR.36、PR.37进行设定,其设定值就是允许的输出频率上、下限值。
电磁换向阀是由两个线圈来分别控制两端电磁铁的吸合的,如图2所示。当有一端的线圈接通时另一个必须断开,这样才能保证换向阀滑块的正常运动,不然会出现两个电磁铁同时吸合的情况,滑块两端就会同时受力,使得系统不能正常工作。所以两个线圈在控制时就必须设置互锁,通过硬件和软件两重互锁来保证。
2.2 PLC程序设计
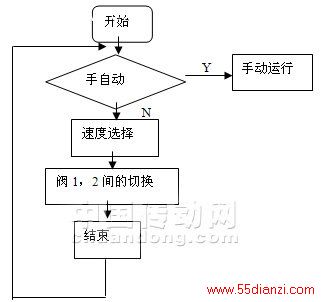
本系统中PLC的主要作用就是控制变频器8段速调速和电磁换向阀。系统流程图如图3。本系统的功能完成主要靠PLC内的程序来实现,有些控制可以由上位机来干预。由于PLC有着极好的稳定性、所以设备的大部分控制功能都由PLC来实现。运转方式分为手动和自动两种。
2.2.1手动方式。
设计中的手动方式可以控制电机的起停、变频器的正常八速段调速、电磁阀的吸合控制。是为了在精度要求不高的时候或作简单测验时(比如测试电机负载情况)能够用较简洁的方式来控制系统的运行。
2.2.2自动方式。
本设计中的自动方式下可以按预定的方式完成活塞杆的往复运动。要求活塞杆能够在到达一个终点以后经过预先设置好的时间后返回。这就要求电磁换向阀的两个线圈必须隔一定的时间轮流吸合或放开。整个过程可以让PLC内部的程序来完成,而不需要人的干预。如果需要切换控制方式,则可以用上位机人机界面上的转换控制按钮或用外接开关强行转换。
3. 人机界面设计
人机界面采用力控组态软件为开发平台,通过组态软件的PLC驱动,实现图形与PLC内寄存器的动画连接,从而可实时监控系统的运行状态。限于篇幅,此处略,系统人机界面如图4

4.调试
在计算机上,通过人机界面进行调试。电机开始可以以正常速度启动,在到达稳定以后先把电磁阀打向左边,让活塞杆向外探出。当活塞杆到达行程的左限是就不能继续前进,但由于溢流阀的作用使得对外输出压力为一恒定值,通过调节溢流阀开口的大小,可以调整此值的大小。活塞杆的进退速度跟电机转速、溢流阀开量均有关系:当电机转速升高时,活塞杆的进退速度就增加,反之降低;当溢流阀的开量增加时,进退速度就会减小,反之加快。
调试结果表明,PLC控制运行无误,系统完全符合要求。该系统已应用于我校的实验教学,取得良好的效果,并顺利通过有关验收,有较高的推广价值。
本文关键字:暂无联系方式通用机械,应用领域 - 通用机械






