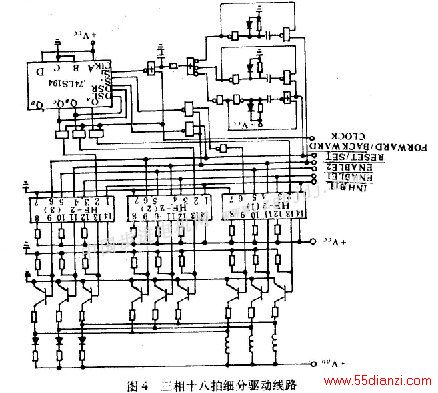
 电路的时钟脉冲通过一个移位寄存器进行分配。输入脉冲的第1、4、7……被接到1号分配器;输入脉冲的第2、5、8……被接到2号分配器;输入脉冲的3、6、9……被接到3号分配器。因此这三个分配器各对应相的输出波形依次要滞后一拍,见图5所示。
电路的时钟脉冲通过一个移位寄存器进行分配。输入脉冲的第1、4、7……被接到1号分配器;输入脉冲的第2、5、8……被接到2号分配器;输入脉冲的3、6、9……被接到3号分配器。因此这三个分配器各对应相的输出波形依次要滞后一拍,见图5所示。

 从高电平变低的瞬变经微分后形成)使QA、QB、Q c分别置成1、0、0,为移位寄存器向1号环形分配器输送驱动脉冲作准备。随后
从高电平变低的瞬变经微分后形成)使QA、QB、Q c分别置成1、0、0,为移位寄存器向1号环形分配器输送驱动脉冲作准备。随后 由“0”变“1” (初始设定结束),74LS194的S 0和S 1将由
由“0”变“1” (初始设定结束),74LS194的S 0和S 1将由 的状态决定,其中S 0与之同相, 而S1与之反相。当
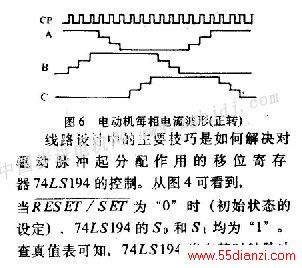
的状态决定,其中S 0与之同相, 而S1与之反相。当 为“1”时,74LS194将作右移,反之则作左移。74LSl94的时钟脉冲与环形分配器的驱动脉冲取自同一来源,但是环形分配器取用驱动脉冲的上升沿;而74LS194取用驱动脉冲的下降沿(经倒相后解决与74LS194的配合),两者相差半拍,这样在驱动脉冲的上升沿使相应的环形分配器走过一步,而在驱动脉冲下降沿的形成过程中使74LS194移过一位,为下一次驱动脉冲分配作好准备。基于类似的原理,当方向位
为“1”时,74LS194将作右移,反之则作左移。74LSl94的时钟脉冲与环形分配器的驱动脉冲取自同一来源,但是环形分配器取用驱动脉冲的上升沿;而74LS194取用驱动脉冲的下降沿(经倒相后解决与74LS194的配合),两者相差半拍,这样在驱动脉冲的上升沿使相应的环形分配器走过一步,而在驱动脉冲下降沿的形成过程中使74LS194移过一位,为下一次驱动脉冲分配作好准备。基于类似的原理,当方向位 切换的时候,要预先使74LS194移过一步(移位方向由
切换的时候,要预先使74LS194移过一步(移位方向由 决定),为此在线路中安排了将
决定),为此在线路中安排了将 的瞬变(包括上升沿与下降沿)产生一个专供74LS194使用的时钟脉冲。只是有一点要特别指出的,即要先准备好移位条件,然后再产生时钟脉冲,为此在时间上要有一点滞后,在线路中用RC延迟产生。
最后,由于步进电动机每一相电流是三个功率放大器共同作用的结果,当一相绕组完全通电时,三个功率放大器各提供三分之一的相电流,据此可以选择适用的功率晶体管及限流电阻。由于新的线路设计方案的总功率与传统线路相当,所以电动机驱动部分的体积并不一定比传统线路更大。相反,由于单个功放电路的电流减小了(减至传统线路的三分之一).所以功率管的选择、功率管与分配器之间的匹配等更易得到解决。限流电阻也不用选择大瓦数的线绕电阻,可选用较小功率的线绕电阻。
3细分量的扩展
利用图4线路的设计原理,不难设计出其他小步距角的驱动线路。HF-2环形分配器的使用数目与每一拍所移动的角度关系如附表所示。
的瞬变(包括上升沿与下降沿)产生一个专供74LS194使用的时钟脉冲。只是有一点要特别指出的,即要先准备好移位条件,然后再产生时钟脉冲,为此在时间上要有一点滞后,在线路中用RC延迟产生。
最后,由于步进电动机每一相电流是三个功率放大器共同作用的结果,当一相绕组完全通电时,三个功率放大器各提供三分之一的相电流,据此可以选择适用的功率晶体管及限流电阻。由于新的线路设计方案的总功率与传统线路相当,所以电动机驱动部分的体积并不一定比传统线路更大。相反,由于单个功放电路的电流减小了(减至传统线路的三分之一).所以功率管的选择、功率管与分配器之间的匹配等更易得到解决。限流电阻也不用选择大瓦数的线绕电阻,可选用较小功率的线绕电阻。
3细分量的扩展
利用图4线路的设计原理,不难设计出其他小步距角的驱动线路。HF-2环形分配器的使用数目与每一拍所移动的角度关系如附表所示。

本文关键字:步进电机 驱动电路及控制电路,单元电路 - 驱动电路及控制电路
上一篇:步进电机的失调角及精度






