为了实现水下自主式机器人的控制,设计了一种基于IPM模块的舵机控制电路。该电路将舵机控制信号与舵机位置反馈信号比较获得的直流偏置电压信号作为脉宽调制芯片UC1637的输入信号。UC1637根据输入直流偏置电压信号的变化输出不同占空比的PWM信号驱动IPM模块内部不同IGBT的通断,从而实现舵机的控制。该电路将IPM模块和脉宽调制芯片UC1637用于舵机控制,使该电路具有成本低廉和容易实现的优点。实验结果表明,该控制电路运行稳定,控制精度高,有很强的应用推广价值。
绝缘栅双级型晶体管IGBT是一种由双级型晶体管与MOSFET组和的器件,它既有MOSFET的栅极电压控制快速开关特性,又具有双级型晶体管大电流处理能力和低饱和压降的特点。IPM模块与IGBT模块相比,具有如下特点:内置驱动电路、过流保护、短路保护、控制电源欠压保护、过热保护及外部输出的警报。本文将日本三菱公司的IPM模块PM25RLA120和美国TI公司的电机控制芯片UC1637用于电动舵机控制。
1 设计原理
舵机控制原理框图如图1所示。
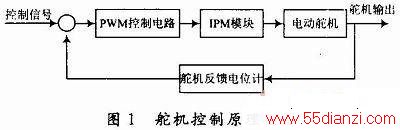
舵机是一种位置伺服的驱动器,其工作原理是:控制信号与舵机位置反馈信号比较,获得直流偏置电压,偏置电压进入信号调制芯片产生一个比较电平,经过PWM控制芯片UC1637后,输出一定占空比的PWM信号,用来驱动IPM电路中IGBT的通断,从而实现电动舵机位置的控制。
2 舵机控制系统电路
2.1 以UC1637为核心的控制电路
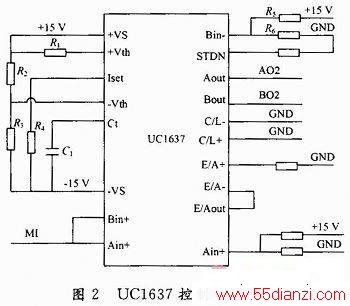
UC1637是TI公司针对直流电机控制设计的芯片,该芯片用来代替通常的驱动电路,内含三角波发生器、误差放大器、脉宽调制器、欠压保护、过流保护电路,提高了电机控制电路的集成度和系统的可靠性。舵机控制电路接收控制计算机发送的操舵信号,与舵机反馈信号比较,校正放大处理后,与一定频率幅值的三角波信号比较后的信号输入UC1637,在芯片内产生一个模拟误差电压信号,输出二路不同极性的PWM控制信号,达到控制舵机打出不同舵角的目的。UC1637控制电路如图2所示,MC2为三角波输出信号,M12为UC1637输入控制信号,A02,B02为输出控制信号,两路控制信号经过光电隔离后控制IPM模块不同的回路的通断控制舵机工作。
2.2 IPM模块驱动电路
IPM模块驱动电路是IPM模块内部电路和控制电路间的接口。良好的外部驱动电路对以IPM模块构成的系统运行效率、可靠性和安全性都有重要意义。器件本身含有驱动电路。所以只要提供满足驱动功率要求的PWM信号、驱动电路电源和防止干扰的电气隔离装置即可。IPM模块PM25RLA120的外围驱动电路如图3所示。
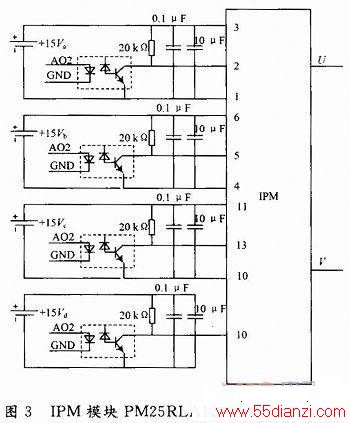
M25RLA120需要4路不共地的+15 V电源,M57140是三菱公司为其IPM系列产品专门配置的电压转换模块,为IPM模块提供4路不共地的+15 V电源。UC1637输出的PWM控制信号A02,B02经高速光耦HCPL-0466送到IPM模块的输入端,6路输入信号的电路结构均相同,这里控制的舵机为有要直流电机,因此图中只画出其中的4路输入信号,高速光耦起到电气隔离IPM与外部电路的作用。
3 结语
实际运行和调试结果表明,基于IPM模块的舵机控制电路具有集成度高、响应速度快、驱动能力强等优点,极大地提高舵机控制电路的可靠性并缩小控制系统的体积,降低产品成本,有着良好的应用前景。
本文关键字:暂无联系方式驱动电路及控制电路,单元电路 - 驱动电路及控制电路
上一篇:DAC功耗数据计算






