图5系统软件整体流程图
4.2姿态检测
如图6所示,iNEMO模块中L3GD20、LSM303DLHC以及LPS331AP通过I2C串行总线与单片机进行通信,I2C总线两根双向信号线一根是数据线SDA,另一根是时钟线SCL,通过上拉电阻接到正电源VDD,每个接到I2C总线上的器件都有唯一的地址,主机发送地址时,总线上的每个从机都将7位地址码与自己的地址进行比较,如果相同,则认为自己正被主机寻址。
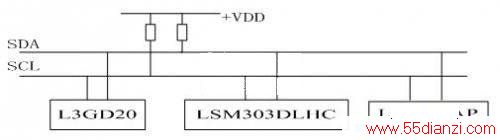
图6 I2C串行总线示意图
iNEMO各个传感器的地址码宏定义如下:
#define ACC_ADDRESS 0x32 //加速度计地址码
#define MAG_ADDRESS 0x3C //磁力计地址码
#define GYRO_ADDRESS 0xD6 //陀螺仪地址码
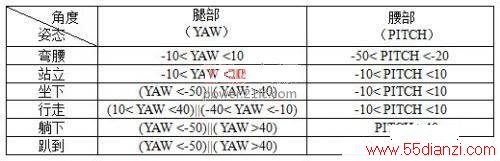
采集到传感器的数据之后,首先利用三轴陀螺仪信号,采用四元数的姿态表达式,积分求得姿态角,然后采用三轴加速度计和三轴磁力计,利用大地磁场和重力磁场在地理坐标系和运动坐标系之间的方向余弦进行绝对角度的解算,然后采用卡尔曼滤波进行前三者数据的融合,得到腰部的俯仰角PITCH、腿部偏航角YAW.通过大量实验建立姿态角与人体姿态的对应表如下:
表1姿态与YAW、PITCH的对应表
4.3 GPRS发送
SIM300参数的设定、TCP/ IP连接的建立以及数据的传输都是通过AT指令来实现的,AT指令是终端设备与PC应用之间的通信方式,一般由终端设备(如PC、控制板等)向终端适配器(如GPRS模块等)发送。AT指令以AT开头,以回车作为结尾;每条指令是否成功执行都有相应的响应返回。SIM300的TCP/IP功能支持普通和透传两种模式,本文采用的是透传模式,一旦建立连接模块就进入数据模式。
SIM300透传模式的配置大致分为以下四步:
(1)匹配波特率,发送“AT”指令后,延时一段时间发送“ATE0”。
(2)注册网络,发送“AT+CREG?”,若返回“OK”,则网络注册成功。
(3)设置透传模式,发送“AT + CIPMODE=1”,若返回“OK”,则设置成功。
(4)连接网络,发送“AT+CIPSTART=”TCP“,”219.236.xxx.xxx“,”7000“”,其219.236.xxx.xxx为PC的IP地址,7000为端口号。连接成功返回:CONNECT OK
5 系统测试
为了验证系统姿态检测功能的可靠性,选取了不同的人分别佩戴该系统做了大量的实验,完成了对站立、坐下、行走、弯腰、躺下、趴倒的识别率的测试。从测试结果表2可以看出,大部分动作均可以准确无误的识别出来,行走、弯腰两个动作出现了误识别,这是由于不同的人佩戴该系统时,各个姿态对应的角度阈值会有少许的差别,但是百分之九十五以上的识别率足够满足用户的要求。
表2测试结果

结束语
人体姿态检测装置实现了对人体姿态的检测,可以很好地应用在对老人的监护、体感游戏等领域。数字式传感器的应用简化了硬件电路,GPRS模块的网络传输突破了射频传输距离短的缺陷,扩大了传输距离,整个系统体积小巧方便、应用性强。
本文关键字:检测 传感-检测-采集电路,单元电路 - 传感-检测-采集电路






