方案2:避障用超声波传感器,超声波传感器是一种利用超声波的特性研究的测量传感器。它主要由压电晶片组成,用来发射和接收超声波。超声波在空气里传播时,会因不同介质的声阻抗不同而产生反射,因此测量发射接收信号间的时间差,可以得到障碍物的距离,该信号经过运算放大器,传送给控制芯片LPC2132,LPC2132发出控制信号改变小车的转向,作出对障碍物的正确判断。超声波传感器的优点是反应速度灵敏,可测距离远,收到外界的干扰小,缺点是超声波在小空间不同方向里会进行多次反射,当和障碍物形成一定角度时,会发生镜面反射,产生幻影,从而动作混乱。
方案3:避障用红外光电开关。红外发射器发出红外线,遇到障碍物后,光线反射回来,接受的光感三极管导通,单片机接受到相应的电平信号。其优点是对近距离的障碍物反应速度灵敏,信号之间抗干扰能力强,缺点是距离要求近,容易受自然光的影响。经过传感器性价比和课题实际要求的综合分析,超声避障实现方便,技术成熟,是移动机器人常用的避障方法,因此我们选择超声波传感器作为机器人的眼睛[5]。
本系统中采用了US-100 超声波测距模块,可实现 2cm~4.5m 的非接触测距功能,拥有 2.4~5.5V 的宽电压输入范围,静态功耗低于 2mA,自带温度传感器对测距结果进行校正,同时具有 GPIO,串口等多种通信方式,内带看门狗,工作稳定可靠。
遥控可以使机器人的操作更加方便,本系统中要通过智能手机遥控机器人,而智能手机的信号正是通过蓝牙发出,因此只需在机器人上安装蓝牙模块。由于机器人只接受数据,不发送数据,所以只需蓝牙的从机模块即可。
本系统中采用了型号为HC-06的蓝牙模块,其中编号06就表示其为从机模块,在蓝牙模块的命名规则中偶数命名的型号出厂时就确定了从机,并无法更改。用户不可以自己切换主机或者从机,用户可以空过AT指令集对蓝牙模块进行配置,AT 指令集较少,包括修改蓝牙名(限于从机),修改密码,修改波特率,询问版本号等几个基本功能。
2.3、软件设计原理
本章主要进行了系统软件设计,完成了底层软件的编写;同时,研究了清洁机器人路径规划算法,实现了三种清扫模式的选择;进一步,研究了智能手机遥控在清洁机器人中的应用。
清洁机器人在实现自动清洁任务时,需要完成如下几个任务:(1)接收手机发出的控制命令;(2)手机控制行走;(3)自动避障;(4)控制驱动轮行走;(5)自动清洁区域。其中接收手机发出的控制命令,对实时性要求比较高,需要中断程序处理,其他传感器信息采用查询方式进行处理。
本系统将软件分成以下几个模块进行实现:手机遥控模块,用户可以通过手机遥控的方式使机器人进行清扫,方便使用,采用中断服务子程序进行处理;自动避障模块,机器人在运行过程中能自动避障,同时完场清扫任务:自动区域清扫模块,机器人可以完成对某一区域的自动清扫;电机控制模块,对电机进行控制实现机器人的行走;这些模块各自封装好,将封装好函数接口留给主函数进行调用。
程序初始化模块主要包括:初始化串口、初始化定时器、开串口中断、开定时器中断、配置独立波特率发生器等。工作过程可以分成两个主要部分:检测控制命令和实现清扫。
对于检测控制命令,要求单片机能够实时响应手机发出的命令,由于是通过蓝牙通讯,则需响应蓝牙通过串口接收到的数据,只需打开串口中断即可。
对于实现清扫,首先要选择清洁模式,再根据不同的清洁的模式,对电机及超声波模块经行相应的控制。
三、项目设计框图
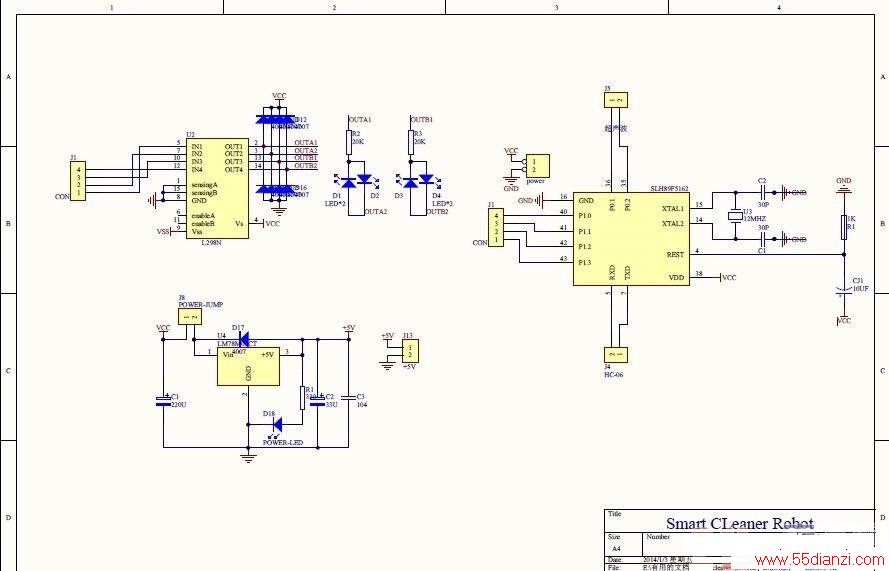
3.1、硬件设计框图

图3-1硬件设计框图
3.2、软件设计框图
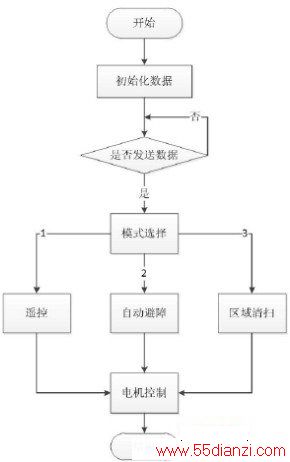
图3-2主程序流程图
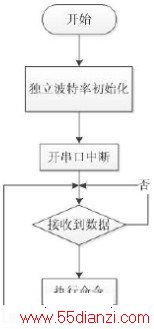
图3-3蓝牙模块流程图
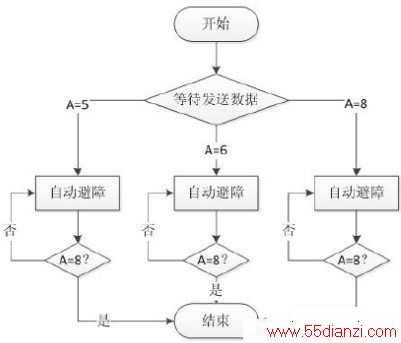
图3-4模式选择流程图
四、测试结果
实物测试结果均完成各项功能,在视频中已经展示,在此不再赘述。
链接: http://pan.baidu.com/s/1bnkWCUz
密码: e3i3
五、附件
附一:硬件电路图