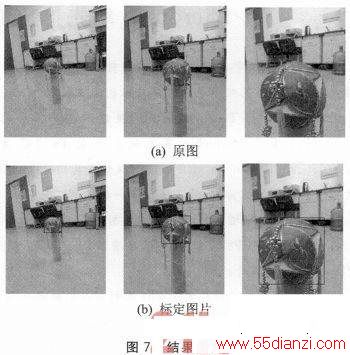
随着机器人的运动,绣球在图像中的位置发生变化,机器人根据标定结果,就可以得到绣球的位置,根据位置调整自己的运动准确找到绣球。图像采集的速度达到15帧/s,舵机控制准确度达到0.32°,可以圆满完成比赛任务。
结语
本文以S3C6410作为主控芯片,设计了具有视觉识别功能的类人机器人控制系统。改进的颜色识别算法利用查表法、类间方差法、连通域等方法对图像进行处理,取得了良好的视频识别效果。实践证明,由该控制系统的设计方案制作而成的类人机器人,具有良好的自主控制稳定性和较好的视觉识别能力,能够较出色地完成比赛。






