系统的软件在ADS1.2下调试通过。由于ARM7TDMI中没有MMU(内存管理单元),所以其操作系统和用户程序要编译在一起,最后生成一个文件。在这一点上不同于在DOS或Windows下的概念,它的操作系统和用户程序是分开的,而且可以由多个应用程序同时存在于主机中。另外在ADS1.2下可以使用c语言进行软件开发,并且可以使用数学库,缩短了软件开发周期。
4、实验结果
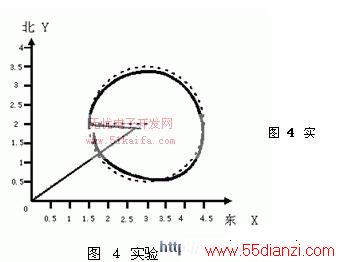
采用上述的软硬件设计方法,我们设计了用于检验各类控制算法的教学机器人平台,并在上边做了系列的实验,图4是上位机控制机器人从世界坐标系的(0,0)点运动到(3m ,2m),然后以该点为圆心,以1.5m为半径,开始圆周运动,圆周运动的起点和终点为(1.5m,2m)。图中虚线是理想轨迹,黑线是实际轨迹。移动机器人的实际轨迹偏离理想轨迹的最大误差约10cm,但是达到了位置精度的要求。误差主要面是由于轮子对的地面的相对滑动以及机械精度引起。该实验证明了系统的可行性。
5、结束语
ARM处理器的丰富的硬件资源以及高速流水线结构给各种智能控制算法提供了可能;另外采用μc/osⅡ操作系统,增强了系统的实时性,避免了前后台方式下任务调度困难,实时性差的缺点。总之,采用32位的ARM处理器和实时操作系统μc/osⅡ来构成机器人的控制器,具有体积小,功耗低,实时性好、处理速度远远超过单片机等优点,可以取得很好的效果。






