经典的正弦脉宽调制(spwm)控制着眼于使变压变频器的输出电压尽量接近正弦波,并未顾及输出电流的波形如何,更未考虑电动机中产生的旋转磁场。然而交流电动机需要输入三相正弦波的最终目的是在电动机气隙形成圆形的旋转磁场,从而产生恒定的电磁转矩。如果对准这一目标,把逆变器和交流电动机视为一体,按照跟踪圆形旋转磁场来控制逆变器的工作,其效果应该更好。这种控制方法称作“磁链跟踪控制”,下面的讨论将表明,磁链轨迹是交替使用不同的电压空间矢量得到的,所以又称“电压空间矢量pwm(space vector pwm,简称svpwm)控制”。
4.1 电压空间矢量
随时间按正弦规律变化的物理量可在复平面上用时间相量表示,而在空间呈正弦分布的物理量也可在复平面上表示为一个空间矢量。图4-1a)绘出了异步电动机定子三相绕组接线图,图中箭头所指为相应物理量的给定正方向。在空间呈正弦分布的三相定子绕组磁动势可用空间矢量fa、fb、fc表示,见图4-1b),它们分别座落在代表三相定子绕组轴线空间位置的a、b、c轴上,而三相绕组合成磁动势的空间矢量为图中的fs。
fs=fa+fb+fc (4-1)
式中,fa、fb、fc的模均在各自的绕组轴线上按正弦规律作脉动变化,时间相位分别差2π/3。它们的合成磁动势空间矢量fs则绕定子参考坐标系的原点o以同步角频率 旋转。当三相定子绕组电流为对称的三相正弦电流时,fs的幅值为常数,是各相磁动势幅值的3/2倍,矢量顶端的运动轨迹是一个圆,即通称的圆形旋转磁场。
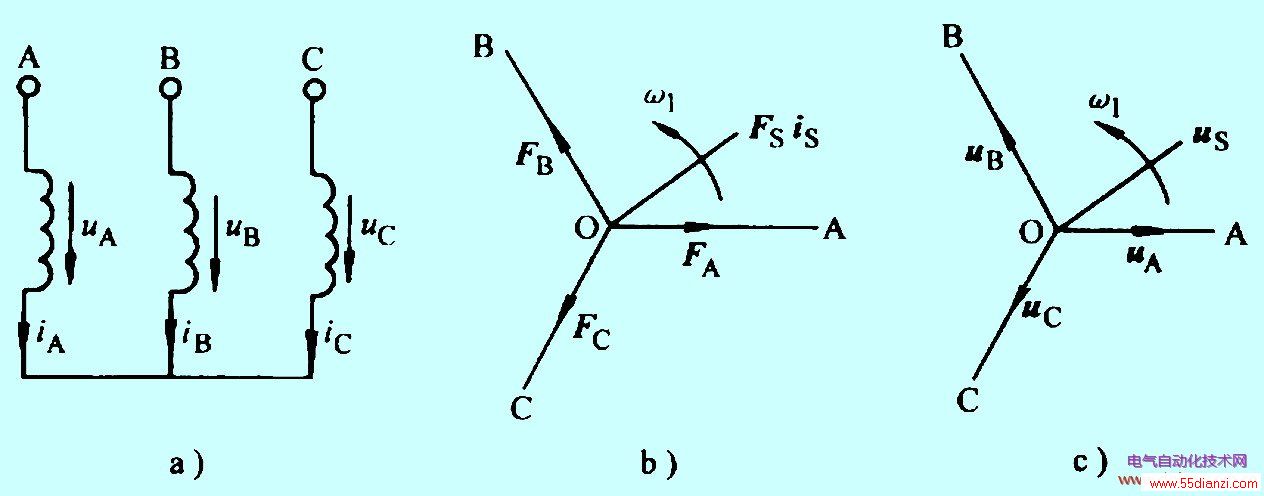
图4-1 定子三相绕组及其磁动势和电压的空间矢量
a) 定子绕组接线图 b)磁动势(电流)空间矢量 c)电压空间矢量
由于每相绕组电流与磁动势存在着简单的比例关系,所以图4-1b)所示的磁动势空间矢量也可认为就是电流的空间矢量,三相合成定子电流矢量为is。
is=ia+ib+ic (4-2)
同理,当有三相对称正弦波相电压加于电机三相定子绕组上时,可在定子参考坐标系上定义三个定子电压空间矢量ua,ub,uc,它们的位置始终落在对应各相绕组轴线上,而大小则随时间按正弦规律脉动,三相电压空间矢量之和为合成电压空间矢量us,它也是一个旋转的空间矢量,其幅值不变,是相电压值的3/2倍;并以电源角频率ω1为电气角速度作恒速旋转,如图4-1c)。当某一相电压瞬时值为最大时,us就落在该相电压空间矢量的轴线上。合成电压空间矢量表达式为
us=ua+ub+uc (4-3)
或把相电压的时间函数和空间相位分开写,得
us=ua0(t)+ub0(t)ejγ+uc0(t)ej2γ
(γ=2π/3) (4-4)
4.2 电压与磁链空间矢量的关系
当异步电动机的三相对称定子绕组由三相平衡正弦电压供电时,对每一相都可写出一个电压平衡方程式,三相的电压平衡方程式相加,即得用合成空间矢量表示的定子电压方程式:
 (4-5)
(4-5)
式中,ψs——定子三相磁链合成空间矢量。
当电动机的转速不很低时,定子电阻压降在式(4-5)中所占的成分很小,可忽略不计,则定子合成电压与合成磁链空间矢量的近似关系为
![]() (4-6)
(4-6)
或 ![]() (4-7)
(4-7)
当电动机由三相平衡正弦电压供电时,电动机定子磁链幅值恒定,其空间矢量以恒速旋转,磁链矢量顶端的运动轨迹呈圆形(一般简称为磁链圆)。这样的定子磁链旋转矢量可用式(4-8)表示。
ψs≈ψmejω1t (4-8)
式中,ψm是磁链ψs的幅值;ω1为其旋转角速度。
由式(4-6)和式(4-8)可得
 (4-9)
(4-9)
式(4-9)表明,当磁链幅值ψm一定时,us的大小与ω1(或供电电压频率f1)成正比,其方向则与磁链矢量ψs正交,即磁链圆的切线方向,如图4-2所示。当磁链矢量在空间旋转一周时,电压矢量也连续地按磁链圆的切线方向运动2π弧度,其轨迹与磁链圆重合。这样,电动机旋转磁场的轨迹问题就可转化为电压空间矢量的运动轨迹问题。
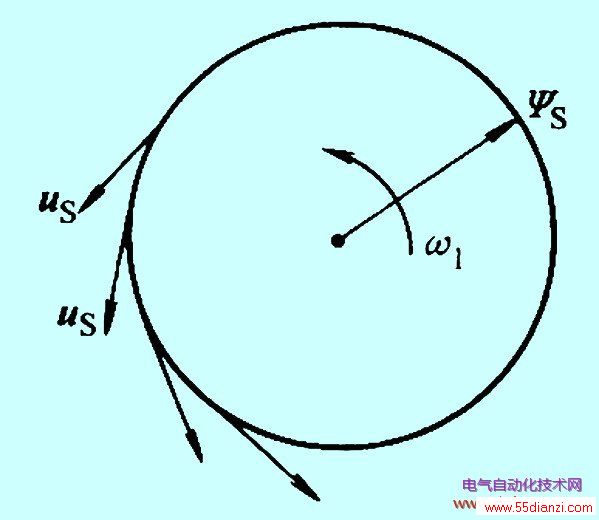
图4-2 旋转磁场与电压空间矢量的运动轨迹
4.3 由六拍阶梯波逆变器供电时电动机的旋转磁场
在变压变频调速系统中,异步电动机如由常规的六拍阶梯波逆变器供电,其输出并不是三相对称正弦电压,此时将得到什么样的旋转磁场呢?定子电压合成空间矢量的运动轨迹将是怎样的呢?
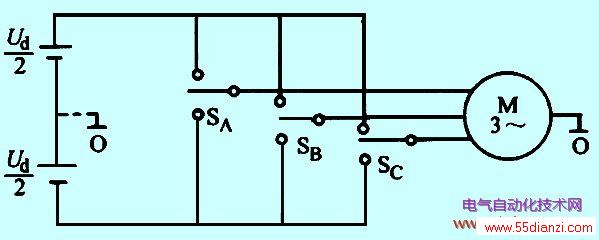
图4-3 三相逆变器-异步电动机原理图
图4-3为简化的三相逆变器-异步电动机原理图,图中六个功率开关器件都以开关符号表示。由于电动机对称工作,逆变器必须三相同时供电,其同一桥臂的开关器件处于互补工作状态,绝不允许同一桥臂上、下两器件同时导通,所以在图中以单刀双投开关sk(k=a、b、c)表示同一桥臂的上、下器件。
定义开关函数

(k=a、b、c) (4-10)
从逆变电路的拓扑结构看,将有23=8种开关模式出现,每一种开关模式由三个开关函数sa、sb、sc 的取值决定,形成相应的定子合成电压空间矢量ui(i=1,2,……8)。例如,当图4-3中逆变器a相上桥臂器件v1、b相下桥臂器件v6、c相下桥臂器件v2导通时,开关函数sa=1、sb=0、sc=0,对应的开关模式可简写作(1、0、0),此时对应的定子合成电压矢量写作u1或us(1、0、0)。由于ua为正、ub,uc为负,按矢量相加的原则可用作图法求得合成空间矢量u1,如图4-4a)所示。由于电动机的b、c两相与直流电源负端相连,其相电压矢量分别为-ub与-uc,矢量模都是ud/2。它们矢量和与a轴同向,模也是ud/2。再与矢量ua相加,得到在(1,0,0)开关模式下的合成电压空间矢量u1,其幅值为ud、方向与a轴一致。
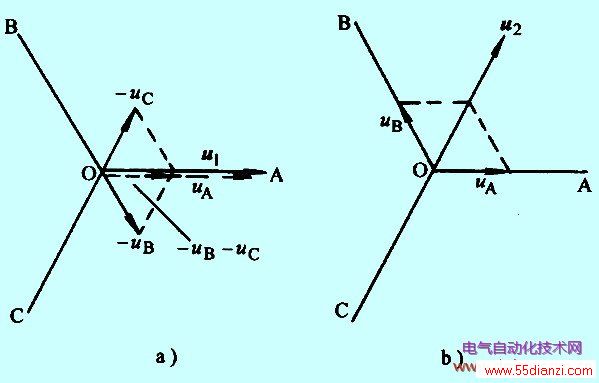
图4-4 电压空间矢量ui的形成
a)100开关模式 b)110开关模式
同样,可求开关模式为(1,1,0)时的合成电压空间矢量u2,如图4-4b)所示。u2与u1的空间相位相差π/3,而幅值相等。表4-1列出了逆变器可能产生的8种开关模式,以及与之对应的应导通器件及8种定子合成电压空间矢量。
根据上述8种开关模式,用作图法画出按放射形分布的定子合成电压空间矢量图,放射形的原点为abc参考坐标系的原点o,见图4-5b)。图中u1- u6六个电压合成空间矢量幅值相等,都等于ud,在空间依次互相差 π/3角度,根据六拍逆变器的工作,它们在时间上也依次相差π/3弧度。这6个电压空间矢量的工作状态都是有效的,称作工作矢量。表4-1中最后两个开关模式实际上没有电压输出,工作状态是无效的,对应的空间矢量u
上一篇:艾默生变频调速系统的通讯设计






