3.3 差分码的快速构建
在使用差分相关算法进行捕获运算时,由于要构建新的差分码是捕获中新增的运算量,因而这里采用文献中的思想,基于块处理方法,利用常规数字匹配滤波器捕获结构进行新差分码的生成。在n和,n-1时刻CDMF输出表达式为:
![]()
其中,xi为接收到的数字信号,ai为本地伪码序列。由于本算法采用的是GPS基带数据保持不动、本地伪码序列作循环移位结构,故式(5)应改写为
![]()
由于C/A码的周期性可得a0=aN,两式相减,得到一个新序列为
显而易见,差分码di的取值范围只有+2、-2和0 3种,当差分码为0时,是不需要乘法运算的。在这里将差分码di中非零各项的位置和数值分别用pj和ej表示,其中j=1~k,K为差分码di(i=1~N)中非零项的个数。由文献的推导,差分码中数值为0的个数为2r-1-1(r为PN码生成多项式的阶数),所以本算法中所需乘法运算的次数K=2r-1,约为CDMF所需数量的1/2。特别是当每个码片采样为M点时,相乘累加运算量降低为常规方法的I/2M,大大降低了系统所需乘法器的数量。经过对GPS卫星32个C/A码序列的分别计算,K取值范围为480~544,与GPS中频信号采样频率和C/A码初始相位无关。
4 算法性能验证
通过GPS中频信号采样器,将普通环境下接收到的GPS卫星信号进行中频采样后,对同一组数据分别用普通捕获算法和本算法进行捕获。采用普通捕获算法对采集到的GPS信号进行捕获的结果如图3所示。当在采集信号中加入22 dBW的高斯噪声后,普通捕获算法的捕获结果如图4所示,而采用本文捕获方案的捕获结果如图5所示。
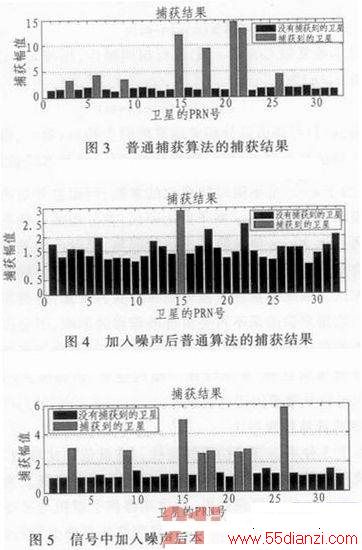
通过上面的对比可以看出,在接收的采样信号中加了仿真噪声后,信噪比降低的情况下,使用普通捕获算法只能捕获到一颗较强的卫星信号。而本文提出的弱信号捕获算法,可以稳定的捕获到低信噪比下的卫星信号,使接收机在弱信号下的定位解算成为可能。采用本算法后多捕获到的较弱的卫星信号,可显着提高GPS接收机灵敏度的同时有效提高定位精度。
5 结束语
通过理论分析算法效果验证,证明本捕获方案具有速度快和灵敏度高的特点,可稳定的捕获信噪比为-42 dB的微弱GPS信号。在低信噪比下,方案中利用GPS数据中帧同步相关的已知信息,有效克服导航数据翻转对相关累积的影响,大大提高了信号处理增益。仿真结果显示,该捕获方案的捕获灵敏度在使用tang搜索捕获判决之后,更加准确的捕获信号。由于采用了快速累积及快速的差分码构建方法,是的本方案在同等条件下的捕获速度明显优于同类算法。
本文关键字:暂无联系方式GPS定位技术,电子知识资料 - GPS定位技术
上一篇:LTE定位技术及测试解决方案






